
Sådan vælger du motorer til fodgængere: En datadrevet sammenligning af levetid, hastighed og stabilitet
Ved køb af fodgængerdrejekors, fokuserer mange kunder i starten på udseende, materialer eller identifikationsmetoder (RFID-kort, ansigtsgenkendelse, QR-koder).
Men i den faktiske projektdrift ligger den grundlæggende faktor, der virkelig bestemmer udstyrs stabilitet, holdbarhed og brugeroplevelse på et dybere niveau:
Fra et ingeniør- og anvendelsesperspektiv kombinerer denne artikel tekniske specifikationer med felterfaring for at hjælpe dig med at forstå forskellene mellem motorløsninger, og hvordan du vælger den optimale til dit projekt.
1. Hvorfor definerer motoren drejekorsstabilitet?
Baseret på drifts- og vedligeholdelsesdata fra adskillige fodgængerportprojekter viser statistikker, at:
a) Cirka 60-70 % af udstyrsfejl stammer fra bevægelsessystemet.
b) Over 50 % af disse problemer er direkte relateret til motoren og dens drivkomponenter. Dette indikerer, at motorsystemet er den primære faktor, der bestemmer en drejekorses levetid, stabilitet og overordnede gennemløbsoplevelse.
Det er også almindeligt at støde på følgende scenarier i feltapplikationer:
c) Indledende drift er jævn og normal.
d) Efter 1-2 års brug begynder udstyret at opleve hakken, unormal støj og hyppige fejl.
Når hovedårsagen spores, er de fleste af disse problemer direkte forbundet med motortypen og dens kontrolmetodologi.
2. Sammenligning af kernedata af forskellige motorløsninger
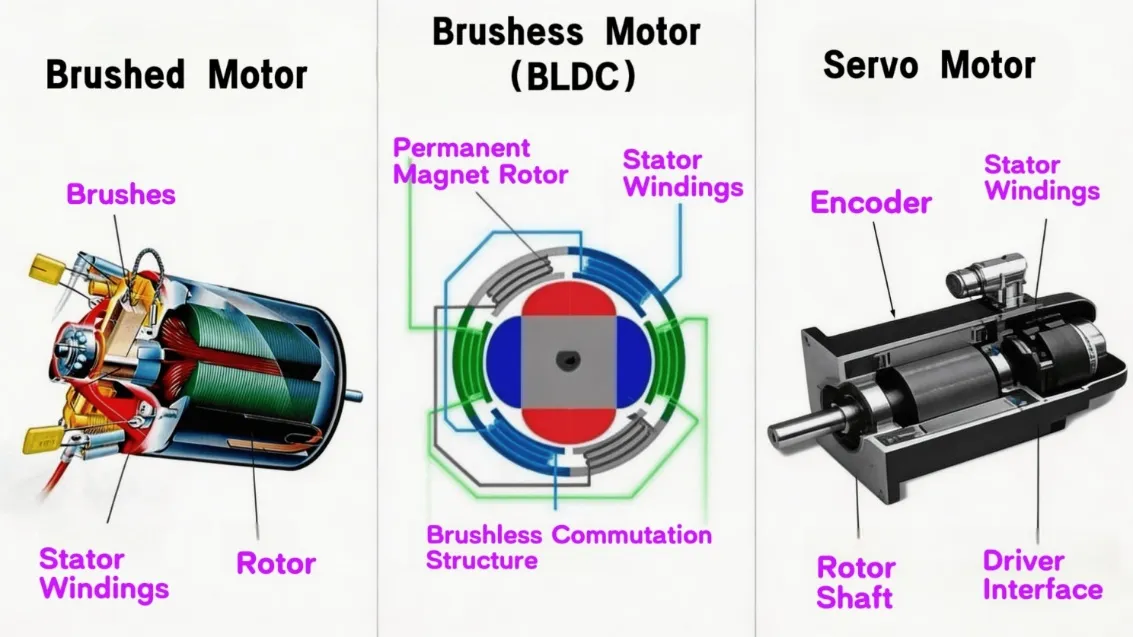
I øjeblikket fodgængerdrejekorspå markedet anvender primært tre motorløsninger: Børstede motorer, børsteløse jævnstrømsmotorer (BLDC) og servomotorer. Følgende er en sammenligning af typiske tekniske parametre (industristandardområder:
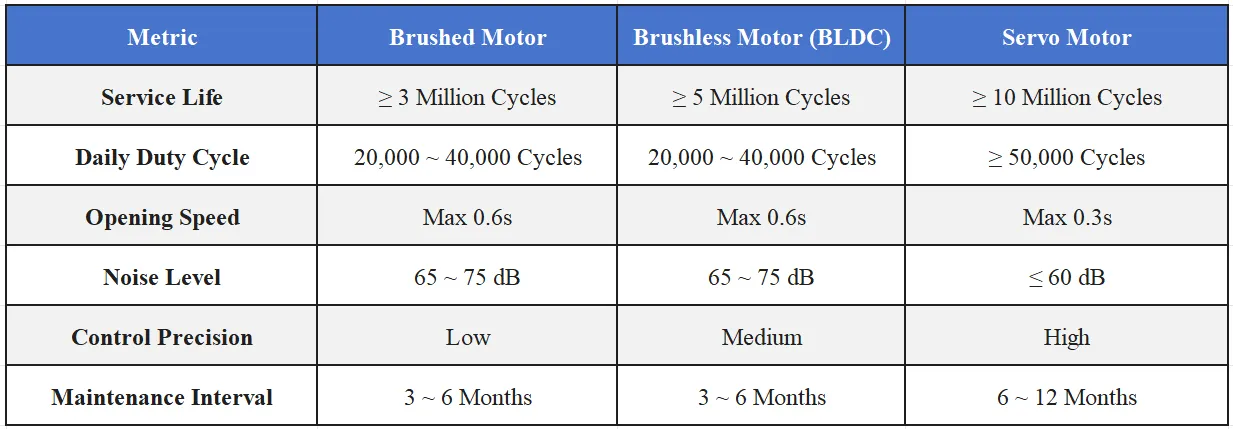
Ved egentlig projektudvælgelse prioriterer vi typisk motorløsninger baseret på gennemløbsfrekvens og levetid frem for blot at sammenligne udstyrsomkostninger. Sammenlignet med traditionelle børstede motorer kan børsteløse motorer (BLDC) øge levetiden med 2-3 gange, mens servomotorer tilbyder yderligere fremskridt inden for hastighed, præcision og sikkerhed.
3. Gennemløbseffektivitet: Kvantificerbar forbedring af brugeroplevelsen
Mange kunder udtrykker et ønske om "glattere drejekors", men "glathed" er faktisk en kvantificerbar metrisk.
a) Åbningshastighed (direkte påvirkning af kø)
Børstet motor: ca. 0,6 s
Børsteløs motor (BLDC): Ca. 0,6 s
Servomotor: Så hurtigt som 0,3s
I kontorbygninger og industriparkprojekter (med daglig trafik på over 20.000) er følgende gennemløbshastigheder tydeligt observerbare:
Børstet motor: ca. 25–35 personer/minut
Børsteløs motor (BLDC): Ca. 25–35 personer/minut
Servomotor: 35+ personer/minut
Forskellen mærkes umiddelbart på, om en lobby oplever kø eller
trængsel.
b) Operationel glathed (eliminering af "stamming")
Kernefaktoren er evnen til accelerations- og decelerationskontrol:
Børstet motor: Ingen kontrol → Barske start/stop-cyklusser.
Børsteløs motor (BLDC): Grundlæggende bevægelsesprofiler → Generelt glatte.
Servomotor: S-kurve acceleration/deceleration → Stort set stødfri.
I højfrekvente transitscenarier forstærkes disse forskelle løbende, hvilket direkte påvirker den overordnede brugeroplevelse.
c) Støjkontrol (påvirkning af miljøet)
Kommercielle kontormiljøer kræver typisk: Støjniveau ≤ 50 dB
Børstet motor: 60+ dB (Mærkbar støj).
Børsteløs motor (BLDC): Generelt i overensstemmelse med standarder.
Servomotor: Næsten lydløs drift.
4. Sikkerhedsevner: Den kritiske indvirkning af motorvariation
a) Anti-pinch responshastighed
b) Børstet motor: 100–300ms
c) Børsteløs motor (BLDC): 50–100ms
d) Servomotor: 10–50ms
e) Jo kortere responstiden er, desto højere sikkerhedsniveau - en forskel, der bliver kritisk i scenarier med høj tæthed.
Resumé: Hvordan undgår man almindelige faldgruber ved udvælgelse?
Hvis du kun fjerner én ting, så lad det være dette: Den virkelige forskel mellem drejekorser ligger ikke i deres ydre æstetik, men i deres motorer og styresystemer.
For at være mere specifik:
a) Lavfrekvente scenarier: Børstede motorer er en levedygtig mulighed.
b) Standardprojekter: Børsteløse (BLDC) motorer er det foretrukne valg.
c) High-End-projekter: Servomotorer anbefales stærkt.
Bundlinie: Valg af den forkerte motor fører til løbende vedligeholdelsesomkostninger; at vælge den rigtige motor gør dit udstyr til et langsigtet, stabilt aktiv. Hvis du i øjeblikket er i gang med projektudvælgelse, anbefaler jeg at fokusere på følgende nøgleområder: Motortype (uanset om det er børsteløs eller servo), kontrolmetode (om den har accelerations- og decelerationskontrol), bevist track record (tilgængelighed af faktiske projektdriftsdata). I specifikke projekter er det ofte langt mere effektivt at skræddersy motor- og styringsskemaet til de faktiske trafikkrav end blot at sammenligne tekniske specifikationer.



