
Parkeringsstyringssystemer kan være på vej mod 3D
Byer verden over eksperimenterer med smartere måder at administrere parkering på. Nogle bruger data om parkeringspladser til dynamisk at justere priserne og derved sikre tilstrækkelig plads; andre implementerer vejsideparkeringssystemer udstyret med jordsensorer, der integrerer dem i bredere smart city-platforme; atter andre bruger netværkssensorer til at overvåge tusindvis af individuelle parkeringspladser. Disse initiativer deler et klart mål: at reducere overbelastning af køretøjer, øge effektiviteten af parkering langs vejene og gøre mere effektiv brug af begrænset byrum.
Selvom disseparkeringsstyringssystemerer blevet implementeret i adskillige lande globalt, er mange stadig afhængige af fragmenterede eller ufuldstændige data. Installation og storstilet vedligeholdelse af jordsensorer/sløjfedetektorer er dyrt, mens kamerabaserede overvågningssystemer kan være følsomme over for lysforhold eller give anledning til bekymringer om privatlivets fred. Da byer søger at opskalere deres smarte parkeringsinitiativer, ligger udfordringen ikke blot i at indsamle data, men i at gøre det pålideligt, effektivt og i stor skala.
LiDAR-teknologien er begyndt at vinde betydelig indpas i sektoren for parkeringsstyringssystem. LiDAR – et akronym for Light Detection and Ranging – anvender laserimpulser til præcist at fange tredimensionel information om det fysiske miljø og derved give et robust datagrundlag for moderne parkeringsstyring. Fra overvågning af belægning af parkeringspladser til klassificering af køretøjstyper giver LiDAR-baserede systemer operatører mulighed for at få indsigt i parkeringsdynamikker med et granularitetsniveau, som traditionelle løsninger har svært ved at matche.

Hvorfor LiDAR er velegnet til smarte parkeringsstyringssystemer?
I sin kerne fungerer LiDAR ved at bruge laserimpulser til at måle afstande. Disse målinger genererer en tæt, tredimensionel repræsentation af miljøet - kendt som en "punktsky". I modsætning til kamerabilleder forbliver disse data upåvirket af de omgivende lysforhold; i stedet beskriver den det omgivende miljøs geometri med høj præcision.
Disse 3D-data giver adskillige fordele til parkeringsapplikationer.
For det første opretholder LiDAR ensartet ydeevne på tværs af konstant skiftende miljøforhold. Faktorer, der typisk kompromitterer kamerasystemer – såsom mørke, blænding eller skygger – har minimal indflydelse på laserbaserede målinger. Dette gør LiDAR særligt velegnet til udendørs parkeringspladser, garager og vejmiljøer, hvor lysforholdene svinger i løbet af dagen.
For det andet fanger LiDAR fysiske strukturer frem for visuelle udseende. Køretøjer, kantsten, forhindringer og fodgængere registreres alle som tredimensionelle objekter. Dette gør det muligt for algoritmer at identificere og spore objekter pålideligt uden først at skulle analysere todimensionelle billeder, der er tilbøjelige til at misfortolke.
Endelig understøtter LiDAR-data privatlivsbevidst overvågning. Da denne teknologi måler afstand i stedet for visuelle detaljer, fanger den ikke identificerbare funktioner - såsom menneskelige ansigter eller nummerplader - medmindre den er suppleret med yderligere sensorer. For kommuner og operatører, der står over for strenge databeskyttelseskrav, kan dette være en væsentlig fordel. Samlet gør disse egenskaber LiDAR til et stærkt fundament for datadrevne parkeringssystemer.

Belægningsovervågning: LiDAR i applikationer til praktisk parkeringsstyringssystem.
En af de mest direkte anvendelser af LiDAR i parkeringsmiljøer er overvågning af køretøjets belægning.
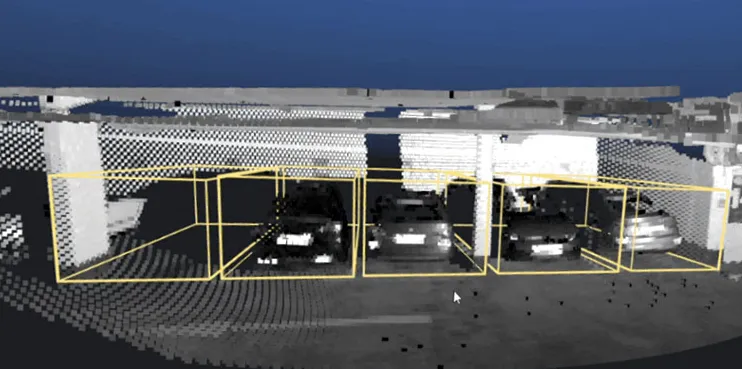
I et typisk installationsscenarie er LiDAR-sensorer monteret på eksisterende infrastruktur – såsom lyspæle eller bygningsfacader – med udsigt over en parkeringsplads eller gadeområde. Sensorerne scanner løbende deres omgivelser og genererer en strøm af 3D-datapunkter. Software behandler disse data i realtid for at opdage objekter, bestemme deres præcise placeringer og klassificere dem.
Parkeringspladser kan udpeges i systemet. Når et køretøj kommer ind i den overvågede zone, registrerer sensorerne det i punktskyen ved at identificere et objekt, der ikke tidligere var til stede. De registrerede punkter udløser en ændring af parkeringspladsens belægningsstatus. Når køretøjet afgår, markeres pladsen efterfølgende som ledig igen.
På grund af den ekstremt høje præcision af LiDAR-data kan størrelsestærskler etableres for objekter, der detekteres inden for hver overvågningszone. Dette sikrer, at små genstande – såsom indkøbsvogne, affald eller forbipasserende fodgængere – ikke udløser falske belægningshændelser. En parkeringsplads er kun markeret som optaget, når det detekterede objekt overskrider forudindstillede parametre (f.eks. de typiske dimensioner af et køretøj). Denne konfigurerbare filtreringsmekanisme forbedrer detekteringsnøjagtigheden og sikrer pålidelige belægningsdata selv i komplekse miljøer, der er karakteriseret ved hyppige køretøjsbevægelser.
Fordi LiDAR er i stand til at fange omfattende rumlig information, kan en enkelt sensor ofte overvåge flere parkeringspladser samtidigt. I strukturerede miljøer - såsom parkeringspladser eller kantstensområder med klart definerede grænser - kan en enkelt installation effektivt dække en hel zone.
Selvom det er nyttigt at vide, om en parkeringsplads er optaget, kan det være endnu mere værdifuldt at forstå "hvad" der optager den.
LiDAR-baseretparkeringsstyringssystemerkan klassificere køretøjer ud fra deres størrelse og form. Ved at analysere 3D-geometrien, der er fanget i punktskyen, kan algoritmer skelne mellem kategorier såsom personbiler, varevogne, lastbiler eller tohjulede køretøjer.
Denne information åbner døren til en lang række praktiske anvendelser. For eksempel kan operatører analysere, om parkeringspladser ved kantsten - oprindeligt beregnet til kortvarige passagerafleveringer - ofte er optaget af varevogne. Tilsvarende kan data vedrørende store køretøjer hjælpe byer med at vurdere parkeringsefterspørgsel inden for læssezoner eller kommercielle parkeringspladser.
Klassificering af køretøjer letter også en mere effektiv håndhævelse. Hvis regler begrænser visse typer køretøjer fra at bruge specifikke rum, kan automatiserede overvågningssystemer markere potentielle overtrædelser til gennemgang.
Inden for parkeringsfaciliteter hjælper køretøjsklassificeringsdata operatører med at forstå, hvordan køretøjer af varierende størrelse påvirker kapaciteten og trafikeffektiviteten. Efterhånden som byvognsflåder bliver mere og mere forskelligartede – lige fra kompakte elbiler til store varelastbiler – bliver denne information stadig mere kritisk for anlægsplanlægning.
Det er vigtigt, at disse analyser er afhængige af tredimensionelle karakteristika snarere end visuel genkendelse. Systemet kan identificere et objekt som havende dimensioner og form som en varebil eller lastbil uden at skulle læse nummerplader eller fange visuelle detaljer.
Parkeringsbranchen er gradvist ved at skifte fra statisk infrastruktur til dynamisk, datadrevet styring. Denne overgang kræver afbalancering af forskellige konkurrerende krav – herunder private køretøjer, godstransport, delte mobilitetstjenester og udnyttelse af det offentlige rum – inden for den begrænsede kapacitet af kantsten og parkeringspladser.
Efterhånden som byer fortsætter med at gentænke parkeringsrollen i det bredere transportøkosystem, vil teknologier, der er i stand til at levere præcise, privatlivsbevidste data spille en stadig vigtigere rolle. LiDAR dukker hurtigt op som et nøgleværktøj, der gør det muligt for operatører at se parkeringsinfrastrukturen gennem en ny linse i deres parkeringsstyringssystemer.



